


 9
9
當前位置:上海育仰科教設備有限公司>>機械創(chuàng)新實訓設備>> YUY-DCY電動輪系傳動特性演示及效率測試實訓設備



YUY-DCY電動輪系傳動特性演示及效率測試系統(tǒng)
一,、電動輪系傳動特性演示及效率測試實訓設備技術(shù)領(lǐng)域
該套系統(tǒng)以復合輪系傳動演示機構(gòu)為設計基礎,在其上添加電氣設備,,在擁有復合輪系傳動演示機構(gòu)所有功能的基礎上,,能夠自動測試和顯示2K-H行星機構(gòu)(正號機構(gòu)、負號機構(gòu))的傳動特性和傳遞效率,。此外,,能夠測試定軸輪系、2K-H行星機構(gòu),、差動輪系,、變齒機構(gòu)的運動學和動力學特性參數(shù)。
二,、電動輪系傳動特性演示及效率測試實訓設備研究背景及意義
機械原理,、機械設計是大學機械、機電類專業(yè)的核心技術(shù)基礎課,,對于培養(yǎng)學生的機械設計創(chuàng)新意識,、分析及解決問題的能力具有重要的作用。輪系結(jié)構(gòu)形式多樣,,運動復雜,,包括定軸輪系、行星輪系,、差動輪系,、周轉(zhuǎn)輪系和復合輪系傳動等,。學生在學習時感覺齒輪構(gòu)件空間運動關(guān)系十分抽象難懂,教師在理論教學時,,多有輪系構(gòu)架運動理論闡釋分析和相關(guān)公式推導計算,,鮮有齒輪系統(tǒng)、行星輪系,、差動輪系,、周轉(zhuǎn)輪系和復合輪系有機結(jié)合的實驗模擬演示系統(tǒng),因而,,非常不利于課堂理論教學的開展和學生對于輪系理論知識的理解與掌握,。 此外,由于輪系具有傳動功率和傳動比變化范圍大,,設計容易,,結(jié)構(gòu)緊湊等諸多優(yōu)點,近年來發(fā)展和應用極為廣泛,,但是關(guān)于輪系運動學和動力學研究測試的相關(guān)實驗設備卻極為少見,,阻礙了輪系的相關(guān)理論研究和實際產(chǎn)品的開發(fā)。
三,、系統(tǒng)方案設計
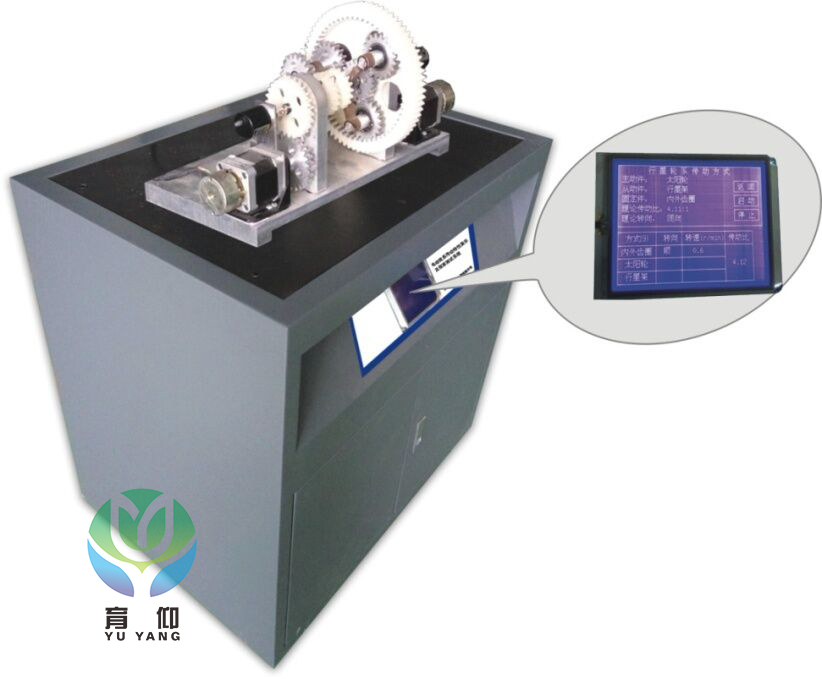
該測試系統(tǒng)能夠提供輪系傳動特性演示和功率,、效率測試,能夠直觀的展現(xiàn)行星輪系,、差動輪系的運動學特點以及在不同輸入狀態(tài)下輪系的傳動效率和功率傳遞形式,。 輪系測試系統(tǒng)的整體結(jié)構(gòu):輪系傳動特性測試系統(tǒng)包括底板和分別設置在底板上的支座a和支座b,支座a中設置有太陽輪軸,,太陽輪軸一端固定連接太陽輪輸入齒輪,、另一端連接內(nèi)外齒圈和太陽輪,太陽輪輸入齒輪與第二步進電機連接,,內(nèi)外齒圈與第三步進電機連接,,支座b中設置有行星架連接軸,行星架連接軸一端固定連接行星架輸入齒輪c,、另一端依次固定行星架輸入齒輪b和行星架輸入齒輪a并與行星架連接,,行星架輸入齒輪c與*步進電機連接,行星架兩端固定有行星少齒齒輪和行星架齒輪,,行星架兩端還分別通過行星架齒輪軸連接行星齒輪,,2個行星齒輪同時與太陽輪和內(nèi)外齒圈內(nèi)齒嚙合。 設計特點:底板上設置有T型槽,,支座a和支座b分別通過螺栓固定在T型槽中,。 支座a與太陽輪軸之間設置有支座軸承,太陽輪軸與內(nèi)外齒圈通過齒圈軸承相連接,,太陽輪軸與太陽輪為花鍵連接,,太陽輪輸入齒輪與太陽輪軸之間設置有擋圈,。太陽輪輸入齒輪與第二步進電機輸入齒輪嚙合,第二步進電機輸入齒輪與第二步進電機連接,,第二步進電機通過第二步進電機支架固定在底板上,;第二步進電機輸入齒輪還與第二編碼器輸入齒輪嚙合,第二編碼器輸入齒輪與第二編碼器連接,,第二編碼器通過第二編碼器支架固定在底板上。內(nèi)外齒圈外齒與第三步進電機輸入齒輪嚙合,,第三步進電機輸入齒輪與第三步進電機連接,,第三步進電機通過第三步進電機支架固定在底板上;第三步進電機輸入齒輪還與第三編碼器輸入齒輪嚙合,,第三編碼器輸入齒輪與第三編碼器連接,,第三編碼器通過第三編碼器支架固定在底板上。 支座b與行星架連接軸之間設置有軸承,。 行星架輸入齒輪c與*步進電機輸入齒輪嚙合,,*步進電機輸入齒輪與*步進電機連接,*步進電機通過*步進電機支架固定在底板上,;*步進電機輸入齒輪還與*編碼器輸入齒輪嚙合,,*編碼器輸入齒輪與*編碼器連接,*編碼器通過*編碼器支架固定在底板上,。 行星少齒齒輪與行星架輸入齒輪b嚙合,,行星架齒輪與行星架輸入齒輪a嚙合,行星少齒齒輪,、行星架齒輪和行星架輸入齒輪c外分別設置有擋圈,。 太陽輪與支座a、內(nèi)外齒圈與支座a,、行星架輸入齒輪c與支座b,、行星少齒齒輪與行星架、行星架齒輪與行星架,、行星齒輪與行星架齒輪軸間分別設置有銷軸,。 底板上還固定有微控制器,微控制器分別與液晶顯示屏和穩(wěn)壓器連接,,微控制器分別通過模數(shù)轉(zhuǎn)換器與*編碼器,、第二編碼器和第三編碼器連接。 本機構(gòu)通過內(nèi)外齒圈將太陽輪的驅(qū)動和齒圈驅(qū)動分為2個,,通過銷軸限制太陽輪,、內(nèi)外齒圈或行星架的周向轉(zhuǎn)動,即可實現(xiàn)不同的運動形式,,行星齒輪和行星架安裝采用對稱布置方式,,使得輪系運動更加平穩(wěn)可靠,,有利于行星變齒機構(gòu)大傳動比、高轉(zhuǎn)速機構(gòu)特性的實現(xiàn),;采用步進電機驅(qū)動,,使得輪系可以高速運轉(zhuǎn)、快速響應,;采用編碼器采集輪系旋轉(zhuǎn)構(gòu)件轉(zhuǎn)速,,轉(zhuǎn)速采集更加準確可靠該演示系統(tǒng)控制簡單,齒輪定位可靠,,精度高,,振動小,操作方便,,加工成本低廉,,空間尺寸合理,結(jié)構(gòu)小巧,,適合大量造并推廣應用,。
四、系統(tǒng)功能
1,、該系統(tǒng)具有復合輪系傳動演示機構(gòu)的所有功能,,能夠?qū)崿F(xiàn)輪系的15種傳動形式。
2,、行星架,、太陽輪、內(nèi)外齒圈的速度直接,、清晰的顯示在液晶顯示屏上,,而且在不同輪系轉(zhuǎn)化調(diào)節(jié)參數(shù)過程中,各操作過程的各項數(shù)據(jù)實時,、動態(tài)顯示與理論傳動比形成對比,。
3、整體尺寸及結(jié)構(gòu)布局設計合理,,加工成本低廉,,結(jié)構(gòu)小巧,并且能夠?qū)崿F(xiàn)多種輪系的運動,,對于加深學生理論的理解和提高動手能力具有很高的實用價值,,適合大量制造并推廣應用。
4,、若將編碼器換成扭矩傳感器,,可以進行輪系傳動效率、傳動功率測試??梢詼y試不同輸入形式下輪系的功率分匯流形式及其效率,,進行相關(guān)輪系傳動機理的科學研究。
五,、實驗項目(可實驗15種,、下面舉例10種)
1、行星輪系(帶變齒機構(gòu))的傳輸方式一固定件為雙聯(lián)齒輪,,雙聯(lián)齒輪兩齒數(shù)相差1個,,分別為=19,=18,,在行星架驅(qū)動軸上可做軸向移動,,將行星架,太陽輪,,內(nèi)外齒圈中其中的任意一個部件作為輸入端,,另外兩個作為輸出端,,此時展示的是變齒機構(gòu)的輸入輸出,。
2、行星輪系(帶變齒機構(gòu))的傳輸方式二雙聯(lián)齒輪固定,,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機構(gòu)支座和雙聯(lián)齒輪連接),,行星架輸入,太陽輪輸出,。將手柄安裝在行星架驅(qū)動軸上,,由手柄驅(qū)動行星架驅(qū)動軸,使行星架為輸入端,,太陽輪作為輸出端,,傳感器將行星架和太陽輪的轉(zhuǎn)過的圈數(shù)顯示出來,即可得到相應的傳動比參數(shù),。
3,、行星輪系(帶變齒機構(gòu))的傳輸方式三雙聯(lián)齒輪固定,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機構(gòu)支座和雙聯(lián)齒輪連接),,行星架輸入,,太陽輪輸出。具體實施方式同輪系輸出方式7,。
4,、行星輪系(帶變齒機構(gòu))的傳輸方式四雙聯(lián)齒輪固定,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機構(gòu)支座和雙聯(lián)齒輪連接),,齒圈輸入,,行星架輸出。將手柄安裝在內(nèi)外齒圈驅(qū)動齒輪軸上,由手柄驅(qū)動內(nèi)外齒圈驅(qū)動齒輪,,帶動其他的齒輪轉(zhuǎn)動,,使內(nèi)外齒圈作為輸入端,此時行星架作為輸出端,,傳感器將內(nèi)外齒圈和行星架的轉(zhuǎn)過的圈數(shù)分別測出由計數(shù)器顯示出來,,即可得到相應的傳動比參數(shù)。
5,、行星輪系(帶變齒機構(gòu))的傳輸方式五雙聯(lián)齒輪固定,,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機構(gòu)支座和雙聯(lián)齒輪連接),,齒圈輸入,,行星架輸出。具體實施方式同輪系輸出方式9,。
6、行星輪系(帶變齒機構(gòu))的傳輸方式六雙聯(lián)齒輪固定,,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機構(gòu)支座和雙聯(lián)齒輪連接),行星架輸入,,齒圈輸出。將手柄安裝在行星架驅(qū)動軸上,,由手柄驅(qū)動變齒機構(gòu)齒輪軸,使行星架轉(zhuǎn)動,,帶動其他的齒輪轉(zhuǎn)動,,將行星架作為輸入端,,內(nèi)外齒圈作為輸出端,傳感器將內(nèi)外齒圈和行星架的轉(zhuǎn)過的圈數(shù)分別顯示出來,,即可得到相應的傳動比參數(shù),。
7,、行星輪系(帶變齒機構(gòu))的傳輸方式七雙聯(lián)齒輪固定,行星架齒輪與雙聯(lián)齒輪 嚙合(銷軸將變齒機構(gòu)支座和雙聯(lián)齒輪連接),行星架輸入,齒圈輸出,。具體實施方式同輸出方式11。 8,、差動輪系的輸入輸出方式八讓機構(gòu)中的所有部件都處于自由狀態(tài),此時無固定件,,當同時任意選擇其中的2個端口作為輸入口,另一個為輸出端口,,則此時展示的為差動輸入,。
9,、差動輪系的輸入輸出方式九無固定件,,選擇太陽輪和齒圈為輸入端,兩輸入端轉(zhuǎn)向可相同或者反向,,行星架作為輸出端,,傳感器將其三者轉(zhuǎn)過的圈數(shù)顯示出來,,即可得到其相應的傳動比關(guān)系,。
10,、差動輪系的輸入輸出方式十無固定件,選擇太陽輪和行星架為輸入端,,兩輸入端轉(zhuǎn)向可相同或者反向,,內(nèi)外齒圈作為輸出端,,傳感器將其三者轉(zhuǎn)過的圈數(shù)顯示出來,,即可得到其相應的傳動比關(guān)系,。
六,、主要參數(shù):
1,、輸入電壓:AC 220±7%50HZ
2,、步進電機:3臺編碼器:3臺液晶顯示屏:1臺
3,、外形尺寸:長780*寬550*高1100




